As some of you know, I have added a damper to the rudder function of my TPR pedals. @B12 modded his as well. I think we both agree that it adds a lot to the feel of the pedals.
For some reason I prefer heavy resistance in my flightsim controllers. I think it has something to do with wrestling real aircraft controls at work. My arms and legs are used to some resistance when flying and I can’t just turn that expectation off, when I’m at my ”Home Office” ![]()
The damper mod made the TPRs suitably heavy.
But the toebrakes are way too sloppy, for my taste. I tried adding a pull-down spring, and that helped, somewhat. But brake pedals, in cars and aircraft, get heavier the further you push them, while most commercially available flightsim pedals have more or less constant resistance and just measure the angle of the pedal. And when your feet are used to modulating pressure, as opposed to position, when braking…things get interesting. It just doesn’t feel right.
So, I needed to find a way to increase the resistance of the toebrakes.
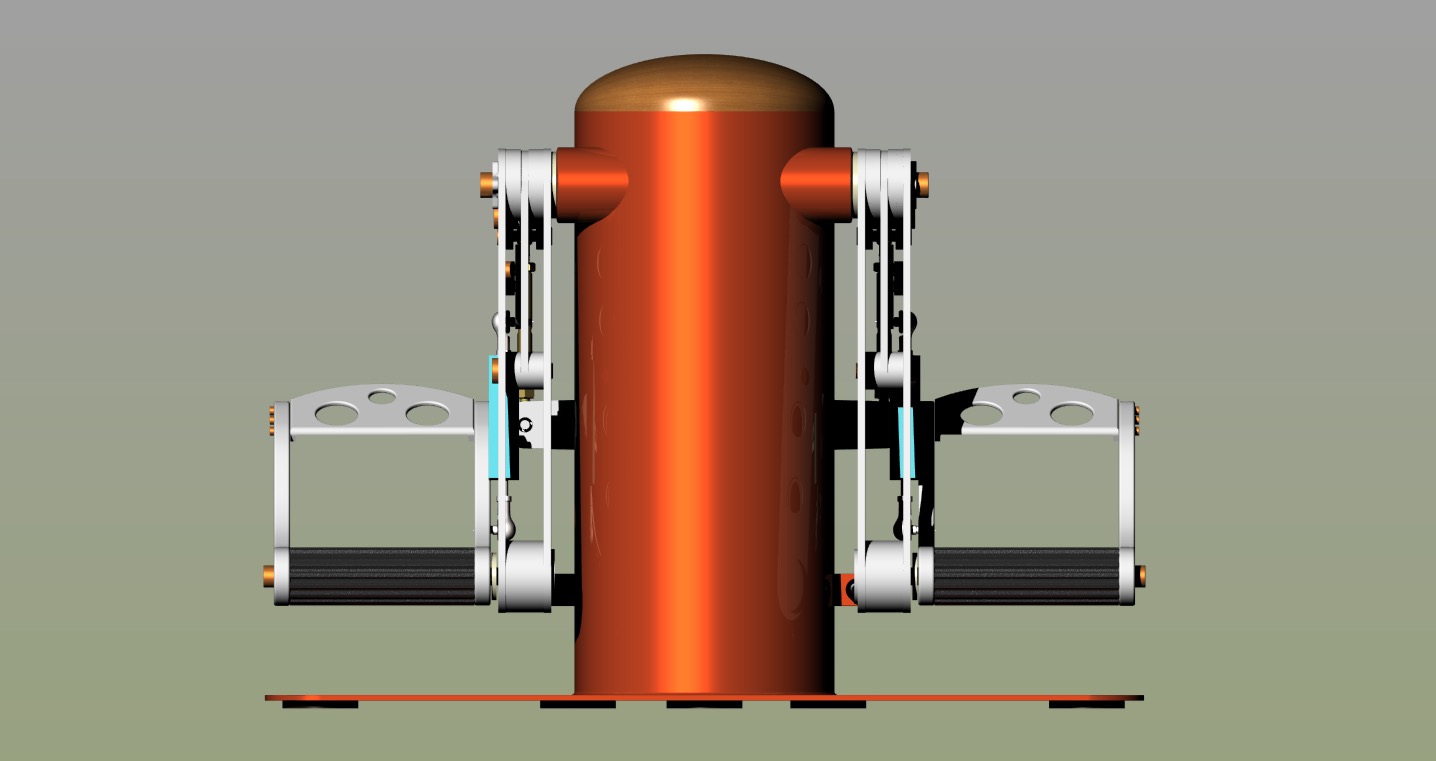
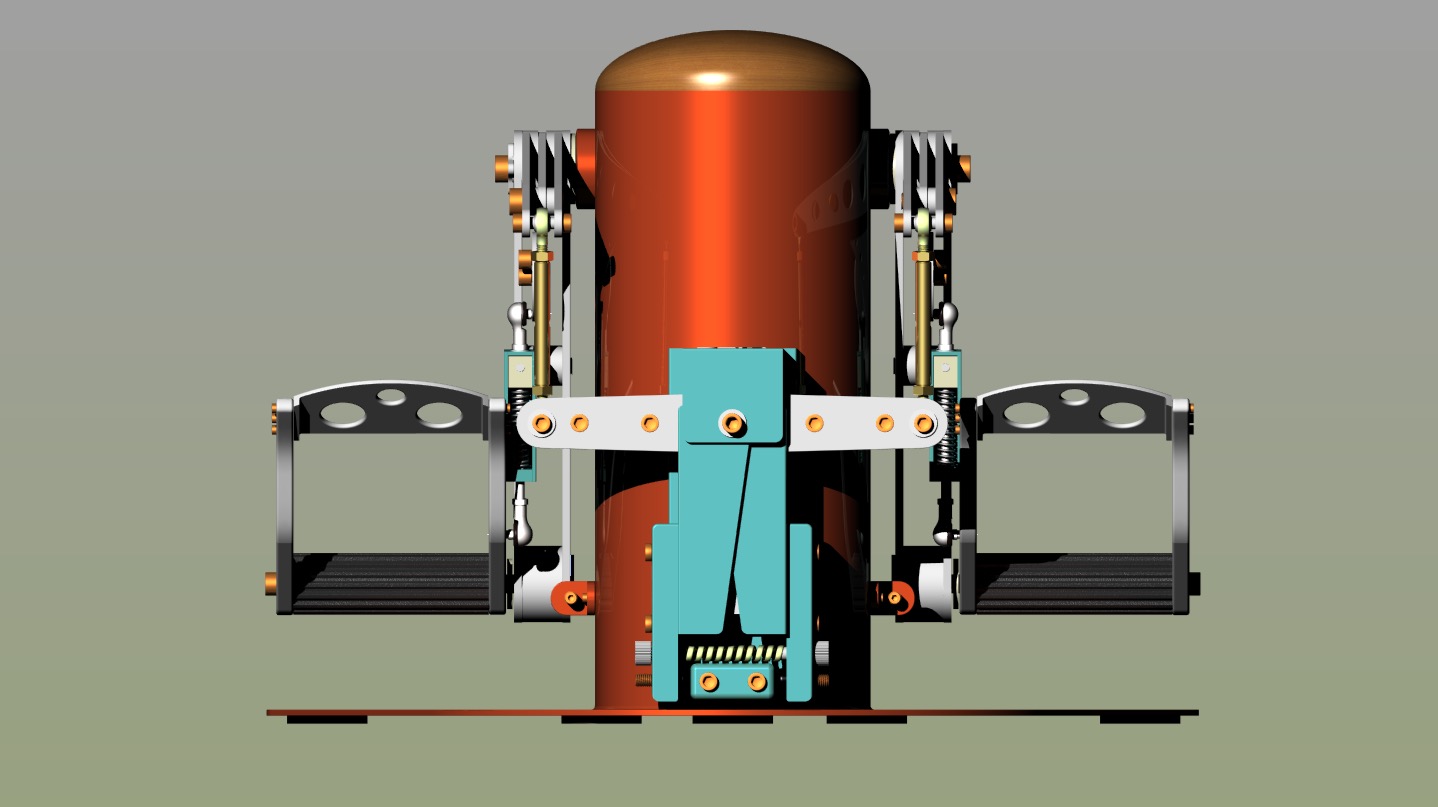
The TPR toe brakes have a hall sensor assembly that also acts as a return spring.
I opened it up and started thinking about using another, larger, spring.
Here’s the new spring installed. The original spring for reference.

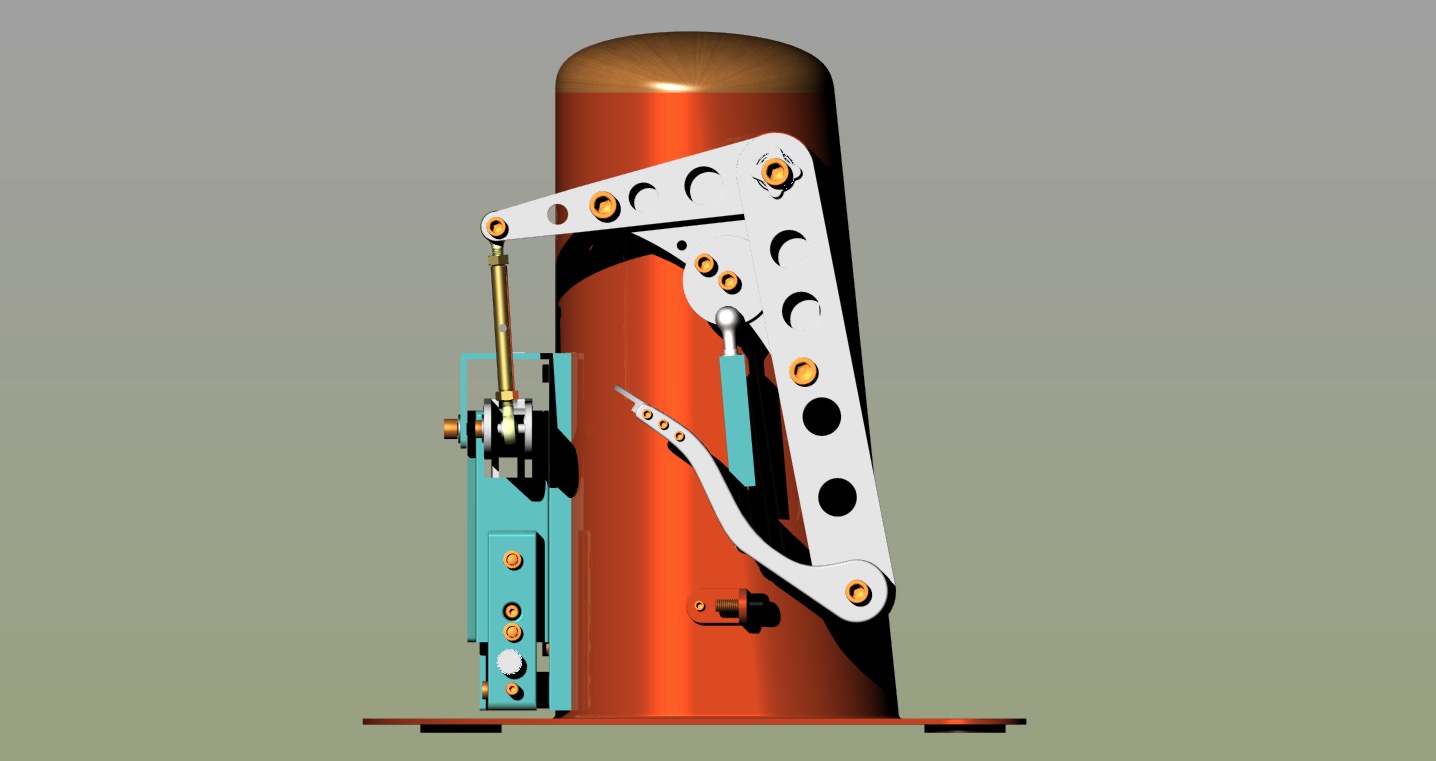
Now, installing a larger return spring like this will put a strain on the rest of the construction. The TPR pedals are ”all metal”. And while that is true, the footrest, swing arm and Hall sensor connector is made of Zamak, which is a popular aluminium alloy that is relatively easy to cast. Thrustmaster uses this alloy in their metal joystick handles as well. Unfortunately it’s rather brittle and breaks before it bends.
The TPR are well built and the only potential achilles heel I could identify was the plastic ball joint and the Zamak attachment.

Thrustmaster designed the pedals to be adjustable. The user can attach the Hall sensor assembly in a number of different holes in the swing arm and in several different positions on the footrest. This allows for different footrest angles and angular displacements.
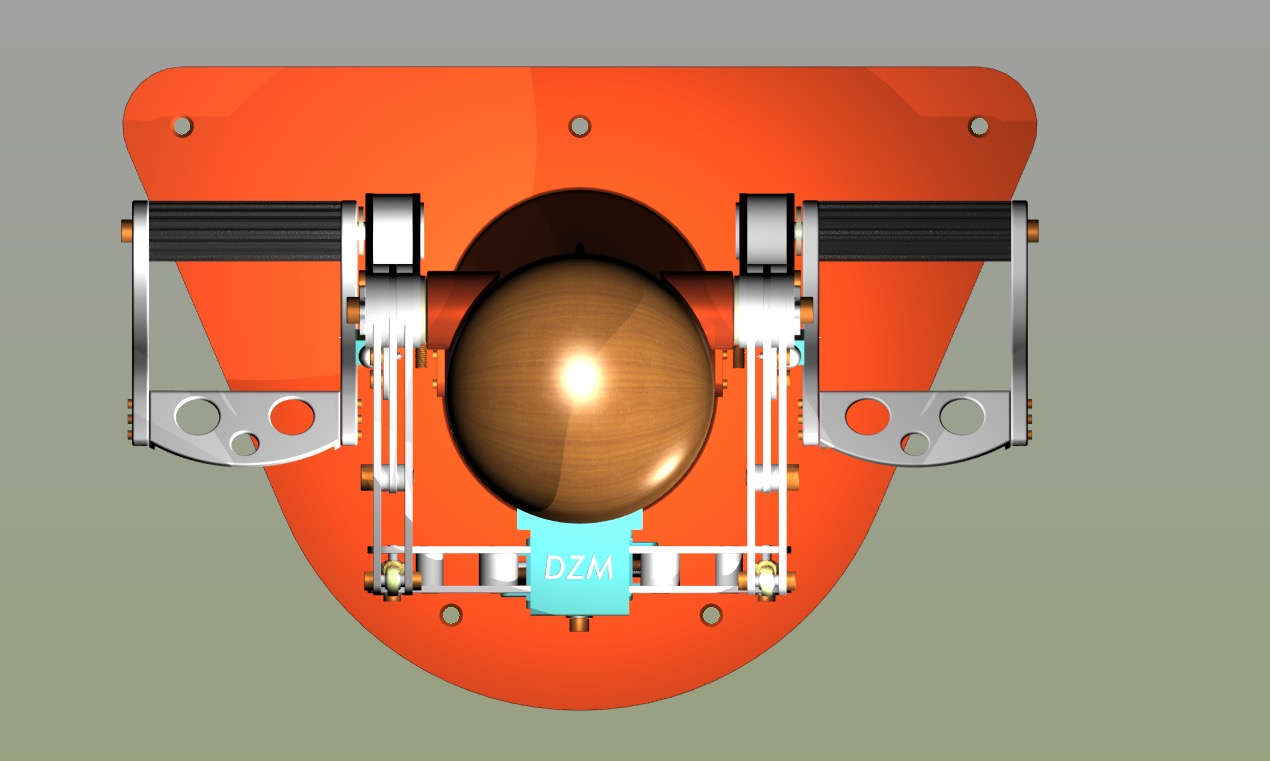
I opted for a new aluminium bracket that is attached to all the available holes in the footrest. Seven 3mm screws, holding it firmly in place.

I also got a couple of all metal ball joints to replace the original plastic ones.

Now the resistance is much harder and my foot won’t automatically floor the toebrake…
Additional ”fun” story:
When plugging in the TPRs, after the modification, I was greeted with a never ending stream of Windows fault messages:
”Windows can’t recognize the last USB device that was connected”, or words to that effect.
I disconnected the TPRs and connected them again.
”Windows can’t recognize the last USB device that was connected”
Great! I managed to mess up my TPRs in the mod…!
I restarted the PC, but the problem persisted.
”Windows can’t recognize the last USB device that was connected”
”Windows can’t recognize the last USB device that was connected”
”Windows can’t recognize the last USB device that was connected”
But the TPRs seemed to work just fine…
I unplugged all other USB devices.
”Windows can’t recognize the last USB device that was connected”
I unplugged the TPR…again.
”Windows can’t recognize the last USB device that was connected”
WTF!?
It’s not the TPRs?
Suddenly it dawned on me.
When removing the TPRs from the SimBox I accidentally nudged a USB powered fan, in the process… This fan is connected to an internal USB port on the Motherboard. I must have pulled its chord, because the connector wasn’t seated fully. Reseated the connector and all was well…
Now, when Windows tells me that it can’t recognize the last USB device that was connected, I kind of assume it actually means the last USB device that was connected… Silly me! ![]()