No more plastic gimbals !
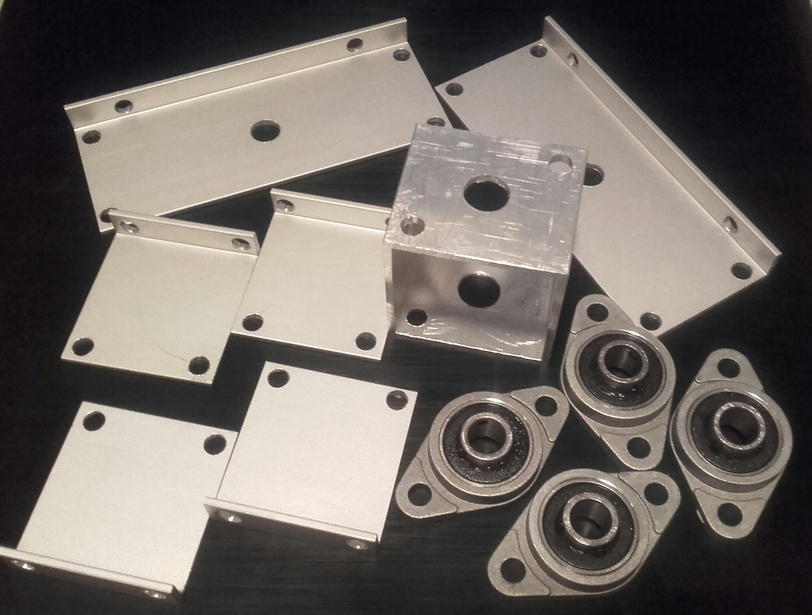
Looking forward to asemble this together … hope it will turn out well ![]()
Hmmmm…my CH Pro pedals that I purchased about 20 years ago seem to be having some issues (the right toe brake goes on when I push the rudder pedals right) - maybe a replacement like this is in order…
Could be the same problem. Plastic tend to wear off.
Especialy with gimbals with separate X and Y axis. TM plastic gimbal design with single spring on T16k and WH sticks is less prone to wear off, but still its plastic. And the central spring has the shortcoming of preventing precise movements around the center. But extension makes the ’ center resistance ’ less noticeable.
So I guess I need to open it up ad see what the issue is.
Ironically, since I have been flying almost exclusively Migs in DCS, this is not an issue. No toe brakes. The wheel brake on the sticking push the rudders. It takes a bit of getting used to but now is second nature.
That was my habit also - I got used to that plastic gimbals that much that I was surprised to realize how bad it was.
At one point I started to blame sim flight model ![]()
…and why not?! After all, I am fairly sure all my Viggen problems are attributable to the FM!
…probably because the FM is accurate and I can’t fly it worth a #@%$…but that’s not the point darn it!
Nice!
What’s the size of the gimbal?
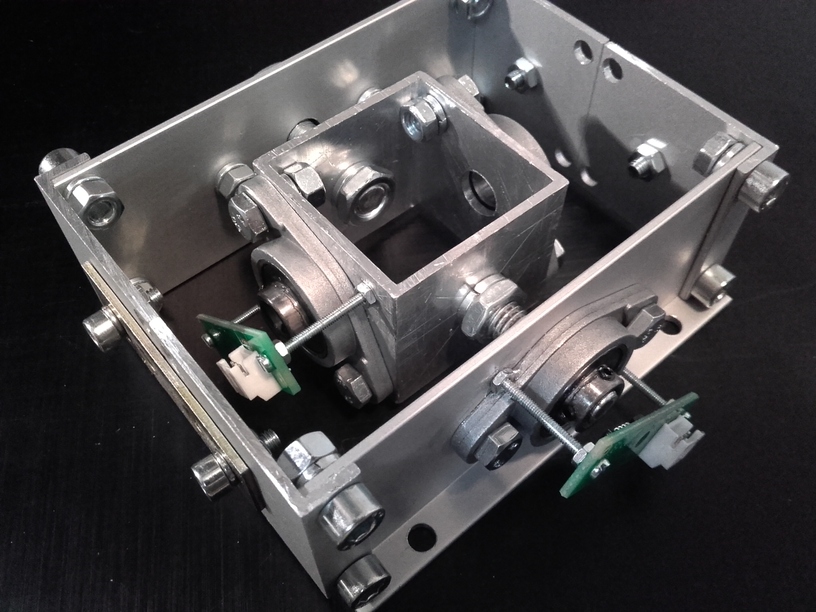
Talking about the size was yesterday realy positively shocked that it fits like exactly into the original COBRA M5 enclosure. Was not aiming for some exact size. All sizes are based on the size of the inner frame - built it from inside out ![]()
Full ( including the board and screws ) outside dimensions are : 114 mm X 118 mm X 40 mm
Inner frame : 40 mm X 40 mm
Outside frame :
Impressive!
I could tell from the size of the sensors, that it was quite compact.
Good job!
What kind of centering mechanism are you going for, if any?
Thx @Troll ! Hopefuly in the near future I will be able to attach your ’ Styrspak ’ to that gimbal ![]()
Right there ![]()
For this first prototype, and as I have the colective already in working state, I would like to use dampers just to simulate the hydraulic boosted helicopter controls.
If in the end I will be happy with it then I am planing, for the second prototype, to use cam system for the centering. Maybe to buy VPC replacement cams and use them.
But this will require slightly other design of the bottom parts of course.
Btw here is the design I used as inspiration : BAUR’s design
Initial test of the gimbal went well. It was pleasure to fly DCS Mi8 with it.
New gimbal is placed litle bit lower in the base so it has restricted travel comparing to the plastic gimbal.
Sticking with it for now ( i.e. using ingame saturation ) as I am still not decided about the length of the stick.
Will you be sharing plans or a parts list? This looks like it would fit inside my cougar base, who’s cheese-metal gimbal failed 5 years ago. But I’ll never sell it ![]()
At least could you share links to the bearings & hall sensors?
I would like to share the plans… but there are none ![]() All the plans and design is atm only in my head. I am realy bad at planing / designing these things. My approach is usaly based on availability of the components.
All the plans and design is atm only in my head. I am realy bad at planing / designing these things. My approach is usaly based on availability of the components.
Anyway this is an early prototype. Once I will start with the second proto I will put down some plans and part list as there are parts I would like to replace.
Nice!
What dampers are those. Details and where to order?
Perhaps angle them slightly upwards?
I angled them upwards only slightly as I had to find a sweet spot there - travel of the damper perfectly covers travel of the stick. Little too much up and damper will be unable to fully extend, little too much down and damper will not fully compress limiting the travel of the stick in both cases.
Test results : DCS & XP helos are good. DCS & XP fixed wings are doable but realy strange feeling with this kind of controls ![]()
As I mentioned in the other thread, for the stick these two dampers are too stiff imo. But it will work for now.
But you know @troll, all these experiments only discloses that I have to continue to the final solution : Baur’s dual-cam design ( used in VPC WarBRD ).
As I see it dual-cams could serve perfectly for both helos and fixed wings - cams with no-center will provide enough precision around the center for fine handling of the helos and the springs centering force will provide the needed feeling for the fixed wings.
That’s a really clever design.